




加州大學洛杉磯分校的研究人員正在開發氣動求囊式的觸覺反饋系統,希望能優化機器人手術
外科應用中的觸覺反饋
近年來,機器人微創手術越來越盛行,透過機器人,能在腹腔鏡手術中增加移動範圍。缺點是機器人缺乏觸覺或觸覺反饋,這在某些部分來說是非常重要的,例如:縫合時的縫合線力量。
使用力量反饋系統了解機器人的抓握力
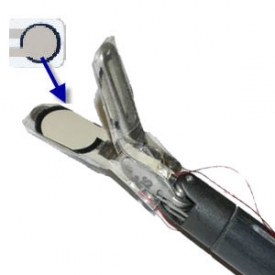
在加州大學洛杉磯分校的David Geffen醫學院,高級外科與侵入式技術中心(CASIT)正在為現有的機器人手術系統開發一款氣動球囊式的觸覺反饋系統。將FlexiForceTM傳感器安裝在機器人的手指末端,當傳感器擷取到力量時,會透過氣動球囊傳導致外科醫生的手指上,讓人員了解目前的力量狀況。
FlexiForceTM傳感器的優勢
.超薄的感測片,將干擾降到最低
.精準的數據,提升您的客戶對產品的信心
.Tekscan製造工廠擁有ISO 9001與13485認證
.100%的精密檢驗,讓傳感器符合既定的規格
 語系
語系 搜尋
搜尋 詢價車
詢價車